Introduction
Differential pressure refers to the difference in pressure between two points in a fluid system. It is the contrast between the pressure at one location and the pressure at another location within the system.
Differential pressure is commonly used in various applications to measure, monitor, and control fluid flow, level, or pressure. It is often used to determine the flow rate of a fluid through a pipe or a vessel, as the pressure difference across a restriction or an orifice is directly proportional to the flow rate.
DP Transmitter
To measure differential pressure, you can use various instruments and methods depending on the specific application. Here are a few common methods.
One of the most common, and most useful, pressure measuring instruments in industry is the differential pressure transmitter (DP Transmitter). This device senses the difference in pressure between two ports and outputs a signal representing that pressure in relation to a calibrated range. Differential pressure transmitters may be based on any of the previously discussed pressure-sensing technologies, so this section focuses on application rather than theory.
Please Click Here to find out more details about Pressure sensing technology, each pros and cons.
DP Transmitter construction and behavior
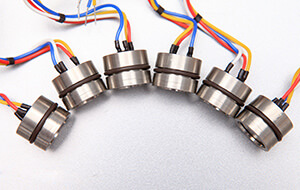
Differential pressure transmitter, also name DP Transmitter, constructed for industrial measurement applications typically consist of a strong (forged metal) body housing the sensing element(s), topped by a compartment housing the mechanical and/or electronic components necessary to translate the sensed pressure into a standard instrumentation signal (e.g. 3-15 PSI, 4-20 mA, digital fieldbus codes):
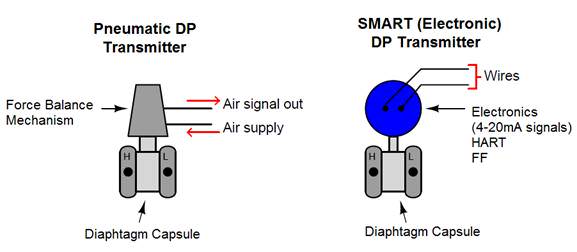
In each of these DP transmitter examples, the pressure-sensing element is housed in the bottom half of the device (the forged-steel structure) while the electronics are housed in the top half (the colored, round, cast-aluminum structure).
Regardless of make or model, every differential pressure (“DP”, “d/p”, or ΔP) transmitter has two pressure ports to sense different process fluid pressures. These ports typically have 1/4 inch female NPT threads for convenient connection to the process.
Find out more Thread types for process connection please refer to below post
- Four Types of Thread Process Connections Your Need Know – Part 1/2
- Four Types of Thread Process Connections Your Need Know – Part 2/2
- The Ultimate Knowledge about Thread for Process Connection you need know
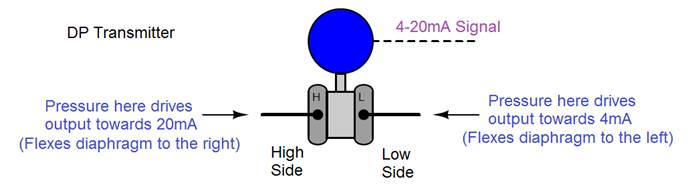
One of these ports is labeled “high” and the other is labeled “low”. This labeling does not necessarily mean that the “high” port must always be at a greater pressure than the “low” port. What these labels represent is the effect any increasing fluid pressure applied to that port will have on the direction of the output signal’s change.
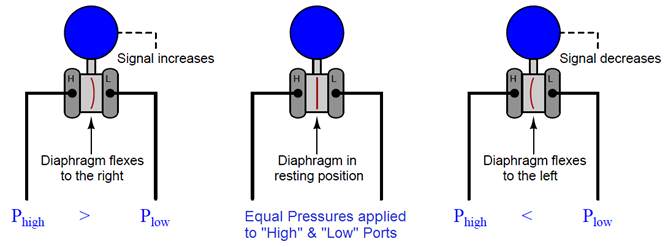
The most common sensing element used by modern DP transmitter is the diaphragm. One side of this diaphragm receives process fluid pressure from the “high” port, while the other receives process fluid pressure from the “low” port.
Any difference of pressure between the two ports causes the diaphragm to flex from its normal resting (center) position. This flexing is then translated into an output signal by any number of different technologies, depending on the manufacturer and model of the transmitter:
For EST4300 Smart DP transmitter, it adopts the most precise and stable Capacitance Sensing Technology by Eastsensor.
The concept of differential pressure instrument port labeling is very similar to the “inverting” and “noninverting” labels applied to operational amplifier input terminals:
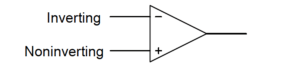
The “+” and “−” symbols do not imply polarity of the input voltage(s); i.e. it is not as though the “+” input must be more positive than the “−” input. These symbols merely represent the different direction each input tends to drive the output signal. An increasing potential applied to the “+” input drives the opamp’s output positive, while an increasing potential applied to the “−” input drives the opamp’s output negative. Phrasing this in terms common to closed-loop control systems, we could say that the “+” input is direct-acting while the “−” input is reverse-acting.
Similarly, the “H” and “L” labels on a DP transmitter ports do not imply magnitude of input pressures; i.e. it is not as though the “H” port’s pressure must be greater than the “L” port’s pressure. These symbols merely represent the different effects on the output signal resulting from pressure applied to each port. An increasing pressure applied to the “high” port of a DP transmitter will drive the output signal to a greater level (up), while an increasing pressure applied to the “low” port of a DP transmitter will drive the output signal to a lesser level (down):
The ability to arbitrarily connect a DP transmitter to a process in such a way that it is either direct-acting or reverse-acting is a great advantage.
In the world of electronics, we refer to the ability of a differential voltage sensor (such as an operational amplifier) to sense small differences in voltage while ignoring large potentials measured with reference to ground by the phrase common-mode rejection. An ideal operational amplifier completely ignores the amount of voltage common to both input terminals, responding only to the difference in voltage between those terminals.
This is precisely what a well-designed DP instrument does, except with fluid pressure instead of electrical voltage. A DP instrument ignores gauge pressure common to both ports, while responding only to differences in pressure between those two ports.
Stated in other words, a differential pressure instrument (ideally) responds only to differential pressure while ignoring common-mode pressure.
To illustrate, we may connect the “high” and “low” ports of a DP Transmitter together using pipe or tube, then expose both ports simultaneously to a source of fluid pressure such as pressurized air from an air compressor.
If the transmitter is in good working order, it should continue to register zero differential pressure even as we vary the amount of static pressure applied to both ports. So long as the applied pressures to each port are equal, the transmitter’s sensing diaphragm should experience zero net force pushing left or right.
All force applied to the diaphragm from the “high” port’s fluid pressure should be precisely countered (canceled) by force applied to the diaphragm from the “low” port’s fluid pressure.
An electrical analogy to this would be connecting both red and block test leads of a voltmeter to a common point in an electrical circuit, then varying the amount of voltage between that point and earth ground.
Since the voltmeter only registers differences of potential between its test leads, and those test leads are now electrically common to one another, the magnitude of common-mode voltage between that one point of the circuit and earth ground is irrelevant from the perspective of the voltmeter:
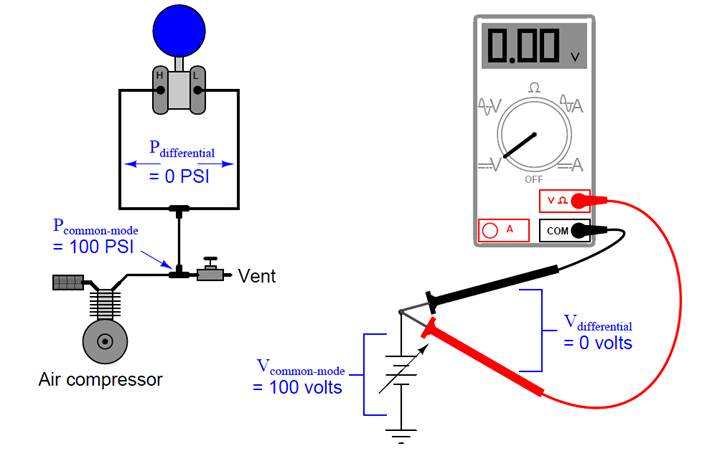
In each case the differential measurement device rejects the common-mode value, registering only the amount of difference (zero) between its sensing points.
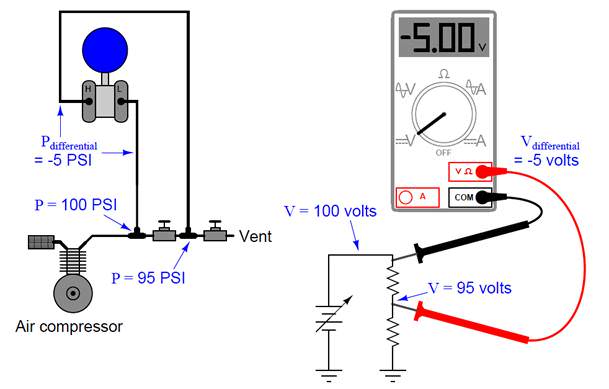
The same common-mode rejection principle reveals itself in more complex fluid and electrical circuits. Consider the case of a DP Transmitter and a voltmeter, both used to measure differential quantities in a “divider” circuit :
Other Differential Measurement Device
In each case the differential measurement device responds only to the difference between the two measurement points, rejecting the common-mode value (97.5 PSI for the pressure transmitter, 97.5 volts for the voltmeter). Just to make things interesting in this example, the “high” side of each measuring instrument connects to the point of lesser value, such that the measured difference is a negative quantity. Like digital voltmeters, modern DP transmitter are equally capable of accurately measuring negative pressure differences as well as positive pressure differences.
This nameplate tells us that the transmitter has a calibrated differential pressure range of 50” H2O (50 inches water column, which is only about 1.8 PSI).
However, the nameplate also tells us that the transmitter has a maximum working pressure (MWP) of 1500 PSI. “Working pressure” refers to the amount of gauge pressure common to each port, not the differential pressure between ports.
Taking these figures at face value means this transmitter will register zero (no differential pressure) even if the gauge pressure applied equally to both ports is a full 1500 PSI! In other words, this differential pressure transmitter will reject up to 1500 PSI of common-mode gauge pressure, and respond only to small differences in pressure between the ports (1.8 PSI differential being enough to stimulate the transmitter to full scale output)